2.From Video-based to Dynamics-based
Published:
Reflections on the transition from video-based to dynamics-based world models and the implications for physical representation in 3D vision research.
Here I document some thought-provoking papers and some of my own research work.
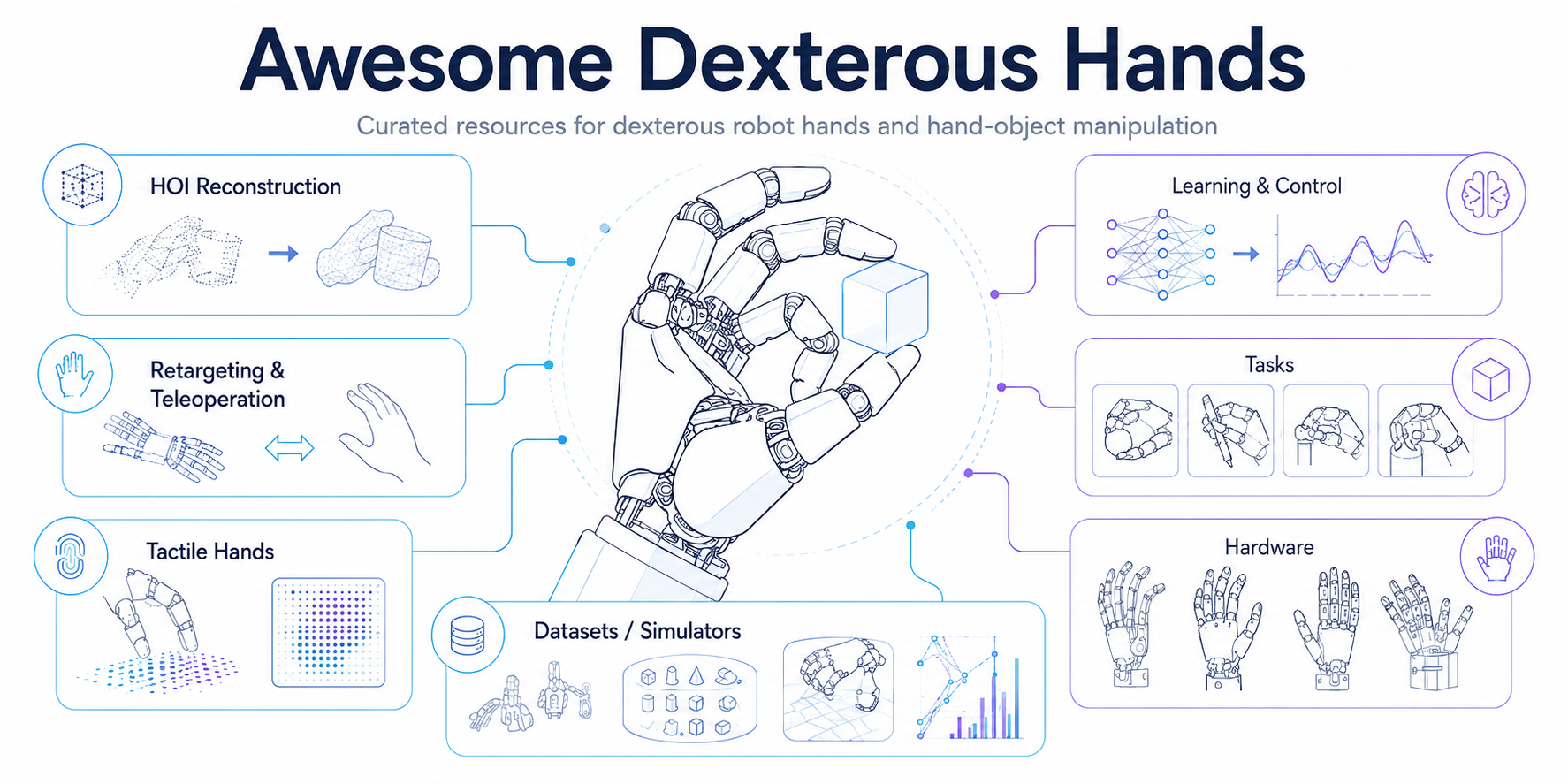
A curated list of dexterous robotic hands — design paradigms, actuation, sensing, and benchmark tasks.
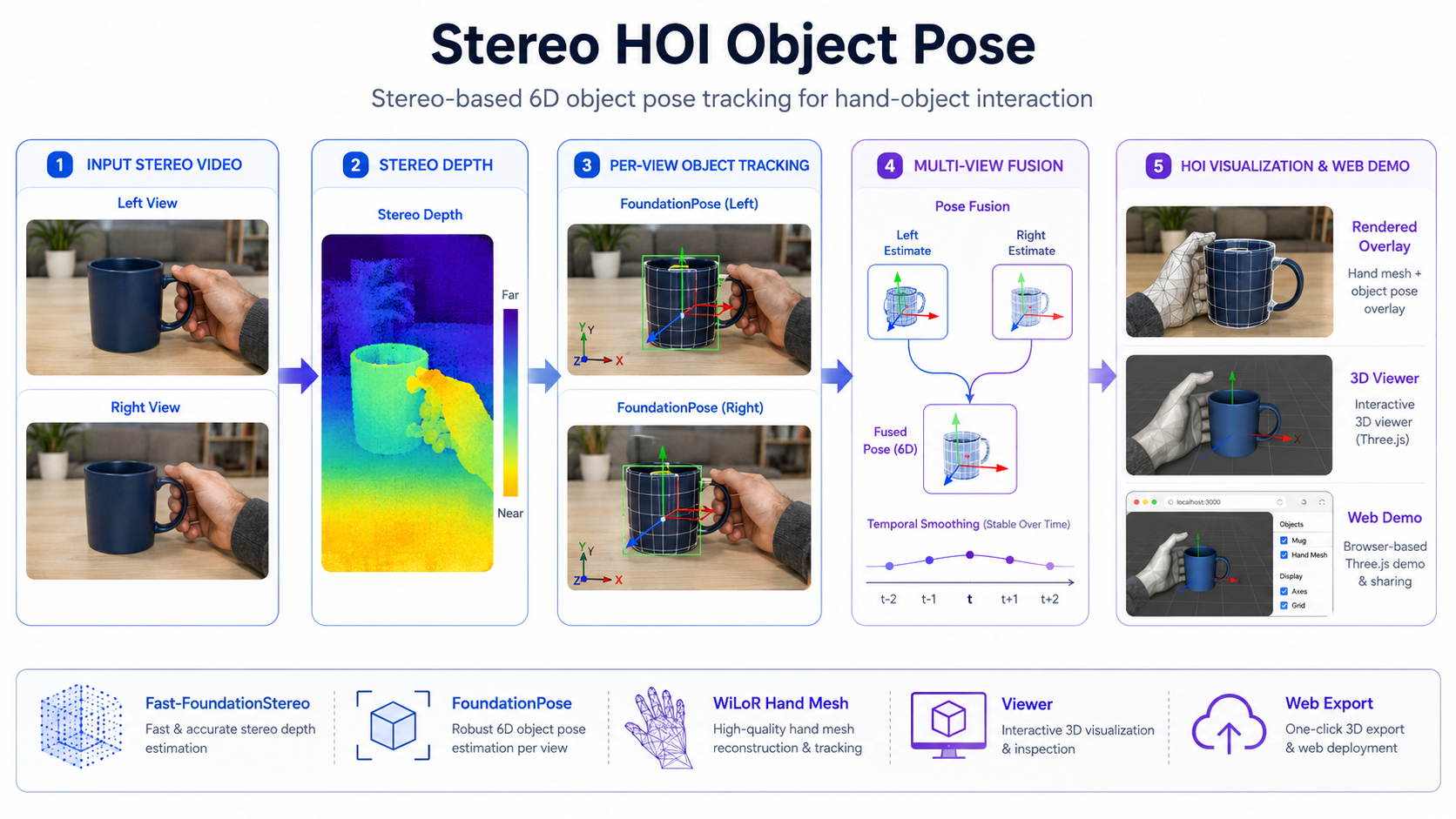
Stereo-based 6D object pose tracking for hand-object interaction videos.
Talks & Interviews that shaped my perspective:
Danfei Xu: Human Data, Behavior Cloning, Robot GPT-3, Full Stack, EgoMimic, Teleoperation, UMI
2023 Future Science Prize Laureate Lecture by Dr. Kaiming He: Deep Residual Learning and How It Shaped the AI Landscape
A 7-hour marathon interview with Saining Xie: World Models, AMI Labs, Yann LeCun, Fei-Fei Li, and 42
Randy Pausch’s Last Lecture: Achieving Your Childhood Dreams
Published:
Reflections on the transition from video-based to dynamics-based world models and the implications for physical representation in 3D vision research.
Published:
Rethinking physical representation in 3D vision beyond reconstruction and explicit simulation, toward interaction-driven and dynamics-aware understanding.